Table of Contents
- Polar Coordinates
- Cylindrical Coordinates
- Spherical Coordinates
- Vector components in rotated Cartesian coordinates
- Basis vector rotation in Cartesian coordinates
Polar Coordinates
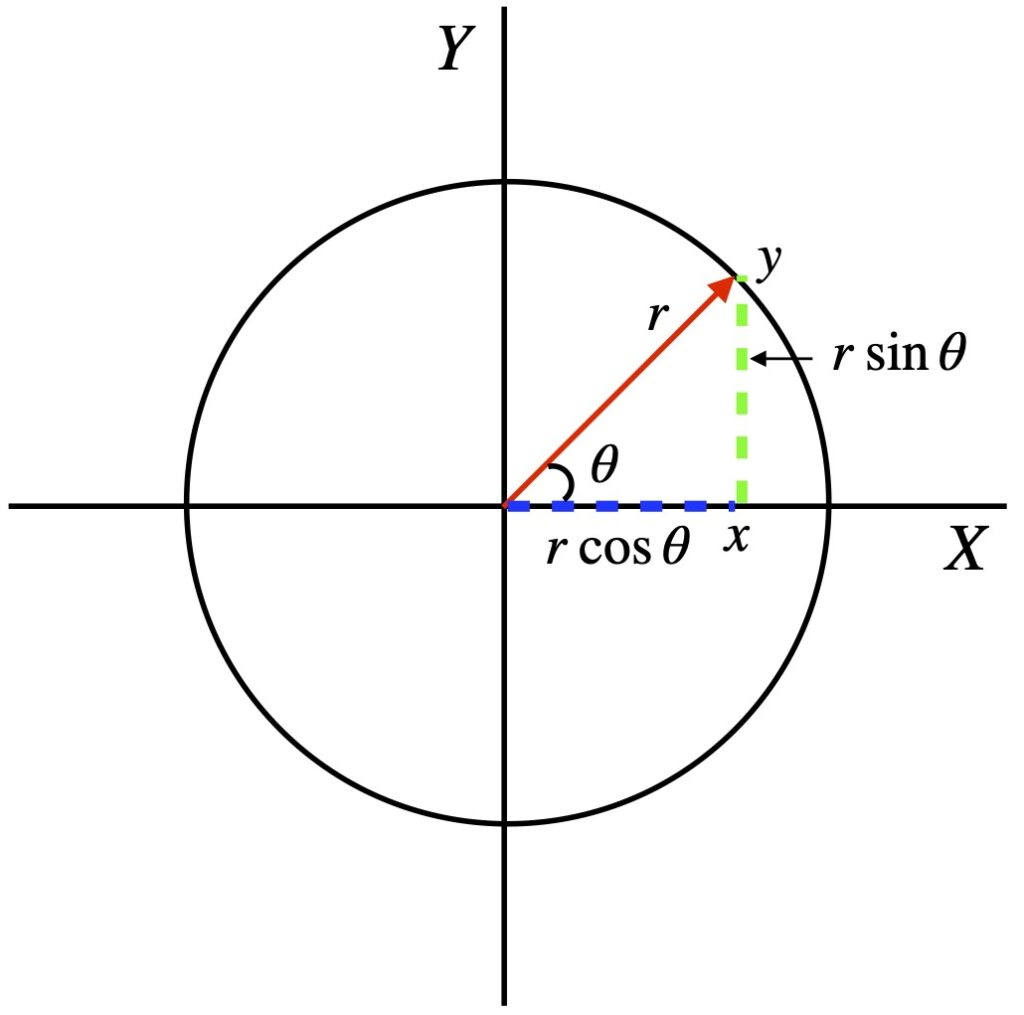
Coordinates




Basis Vectors
We can define the vector  in terms of Cartesian basis vectors:
in terms of Cartesian basis vectors:


We express any basis vector as a partial derivative:

 is a vector tangent to in the u direction. If we want to get a unit vector, we need to normalize by dividing it by
is a vector tangent to in the u direction. If we want to get a unit vector, we need to normalize by dividing it by  .
.
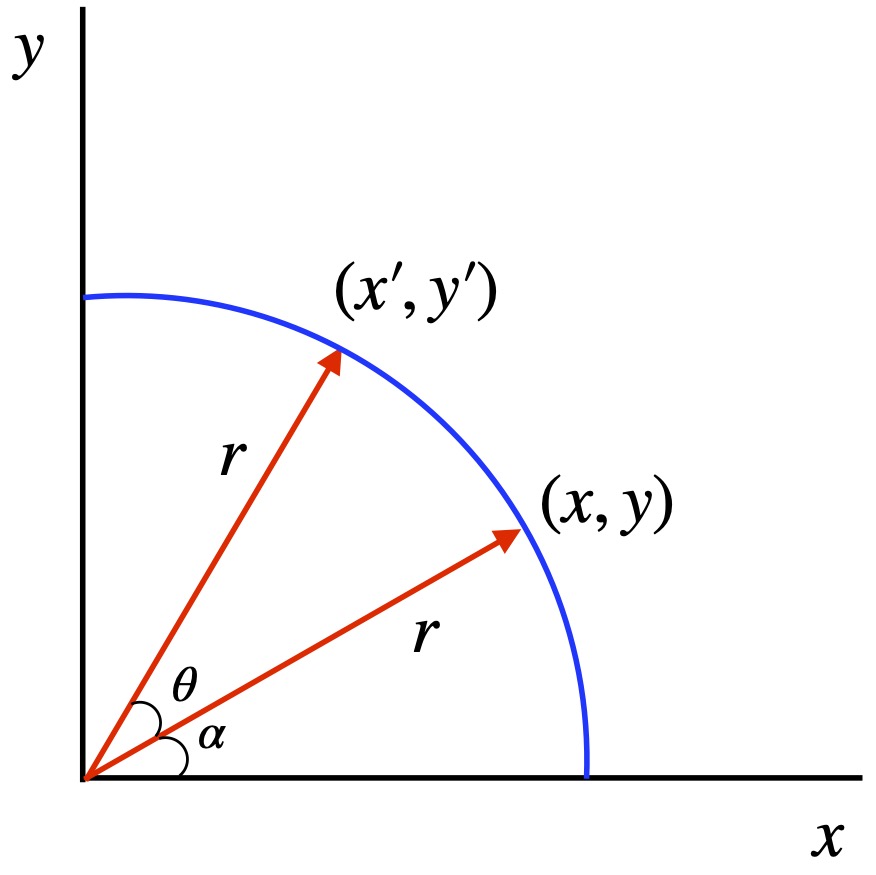
To see why, click :
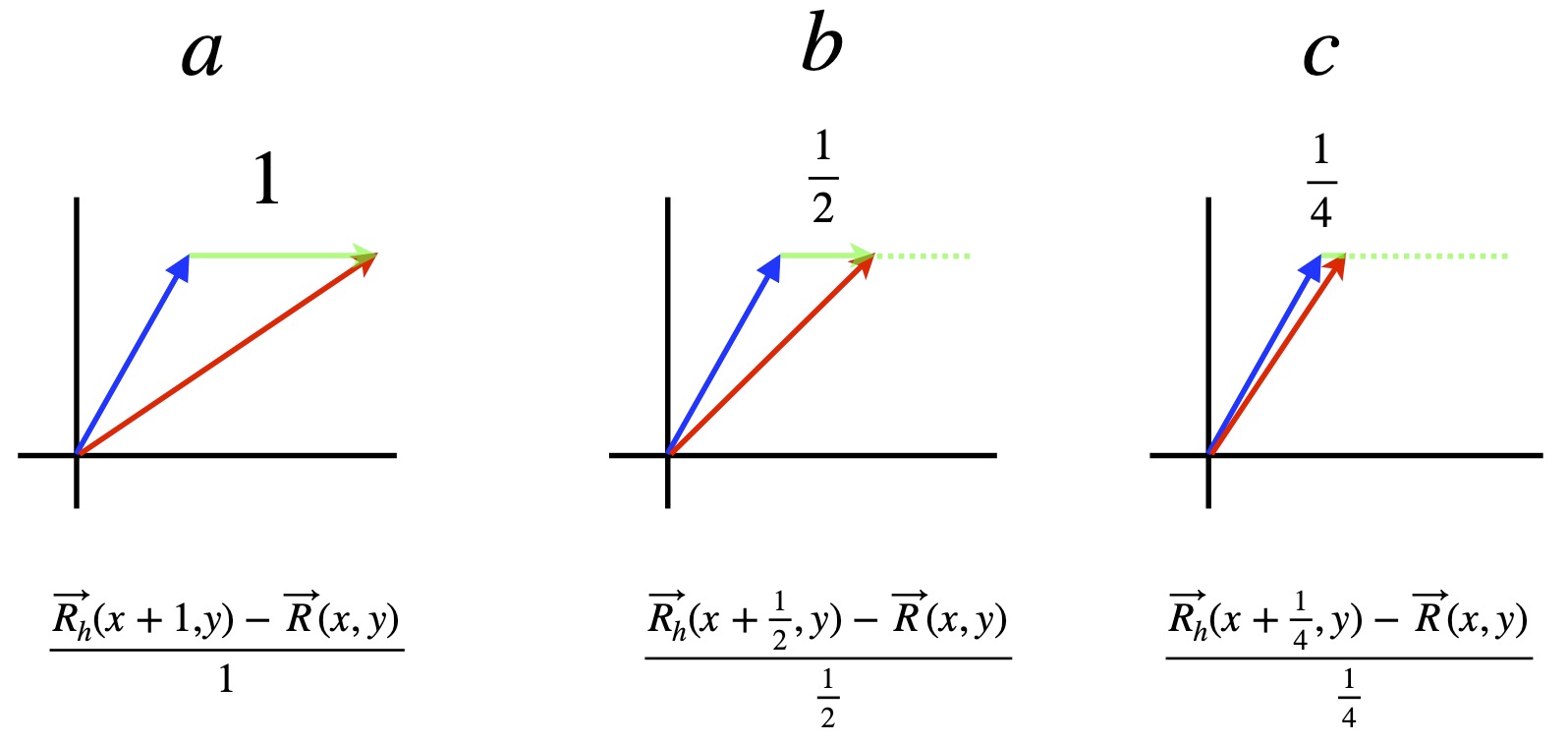
 , a red vector
, a red vector  and a green vector
and a green vector  , which is the difference between the red and blue vectors. In this case,
, which is the difference between the red and blue vectors. In this case,  . Below the picture is an equation which defines an an entity,
. Below the picture is an equation which defines an an entity,  equaling the difference between the red and blue vectors divided by
equaling the difference between the red and blue vectors divided by  (which is equal to
(which is equal to  ). The reason for defining
). The reason for defining  . However, the denominator in our expression for
. However, the denominator in our expression for  remains equal to 1. This is depicted by the dotted green line.
remains equal to 1. This is depicted by the dotted green line. its original length. However, the denominator in
its original length. However, the denominator in  . Therefore,
. Therefore,  with respect to x:
with respect to x: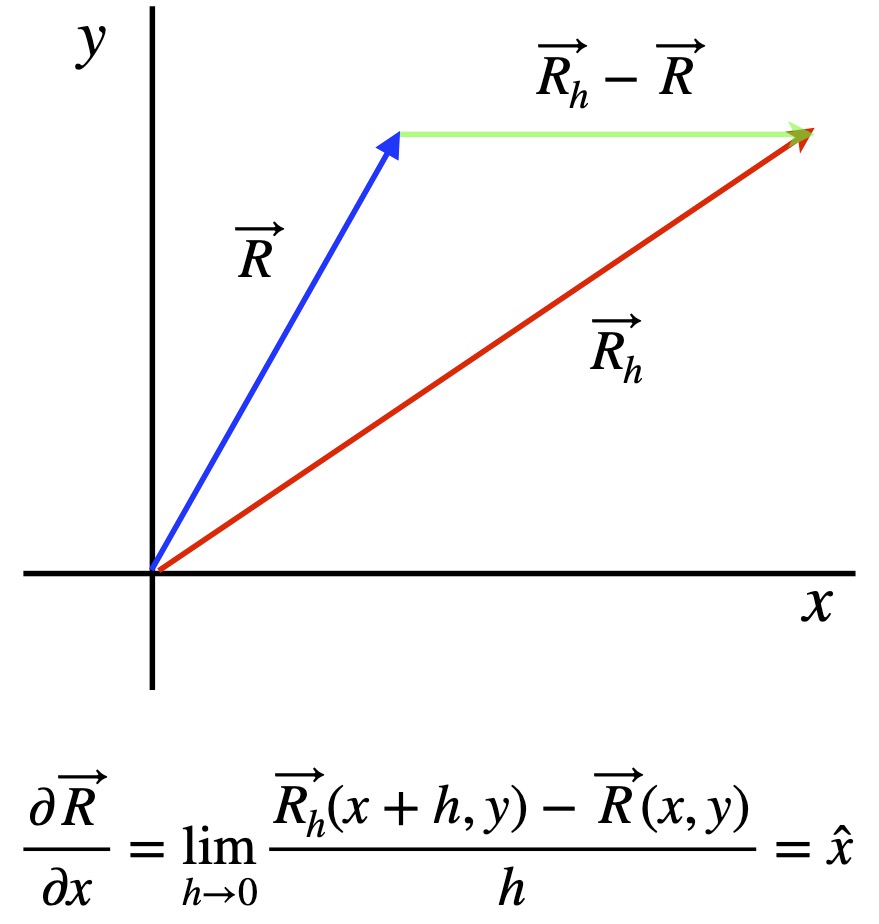
Applying this to eq (), we get:
![\displaystyle \hat{e}_r = \displaystyle \frac{\partial \vec{r}}{\partial r}=\frac{\partial\left[r(\cos\theta\, \hat{x} + \sin\theta\, \hat{y})\right]}{\partial r}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-7f8f59025ab3658573419c9205bbc15e_l3.png "Rendered by QuickLaTeX.com")

and
![\displaystyle \hat{e}_{\theta} = \displaystyle \frac{\partial \vec{r}}{\partial \theta}=\frac{\partial\left[r(\cos\theta\, \hat{x} + \sin\theta\, \hat{y})\right]}{\partial \theta}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-e2d546791b89863970251be9ee56e1b5_l3.png "Rendered by QuickLaTeX.com")

Notice that, unlike the Cartesian basis vectors  and
and  , which are the same length and point in the same direction elsewhere, polar basis vectors vary. Specifically:
, which are the same length and point in the same direction elsewhere, polar basis vectors vary. Specifically:
 varies in direction with
varies in direction with  but is constant in length.
but is constant in length. also varies its direction with . However, in addition, its length scales with
also varies its direction with . However, in addition, its length scales with  .
.
If we’re working with a unit circle i.e.,  , then we can ignore the in our equation for . However, scales with . Note that some authors normalize the expression for by dividing by .
, then we can ignore the in our equation for . However, scales with . Note that some authors normalize the expression for by dividing by .
It’s also easy to show that and are orthogonal. By definition, vectors are orthogonal if their dot product equals zero. For and , we have:

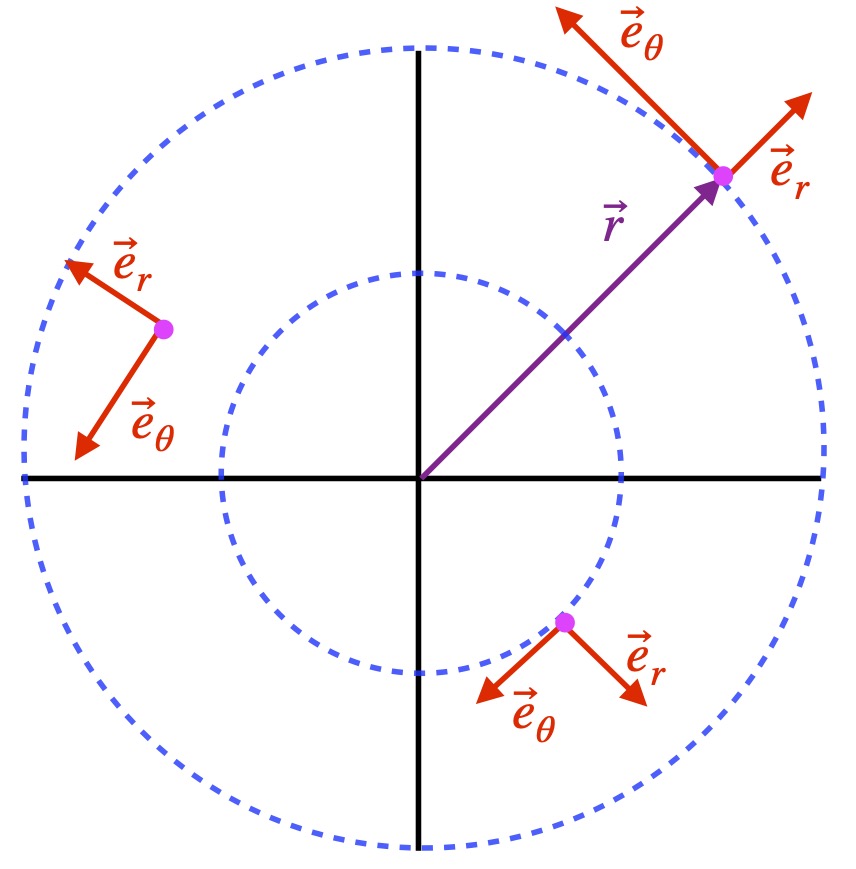
Figure X is designed to provide visual intuition about why basis vectors in polar coordinates are what they are. Figure Xb is a blow-up of the area in figure Xa enclosed in the dotted blue circle. In this figure, we’re assuming that all basis vectors are normalized.
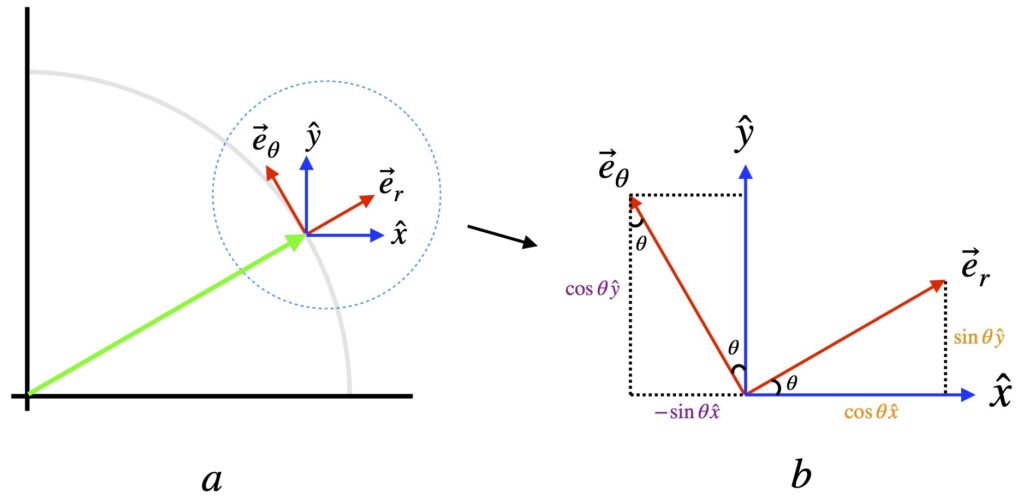
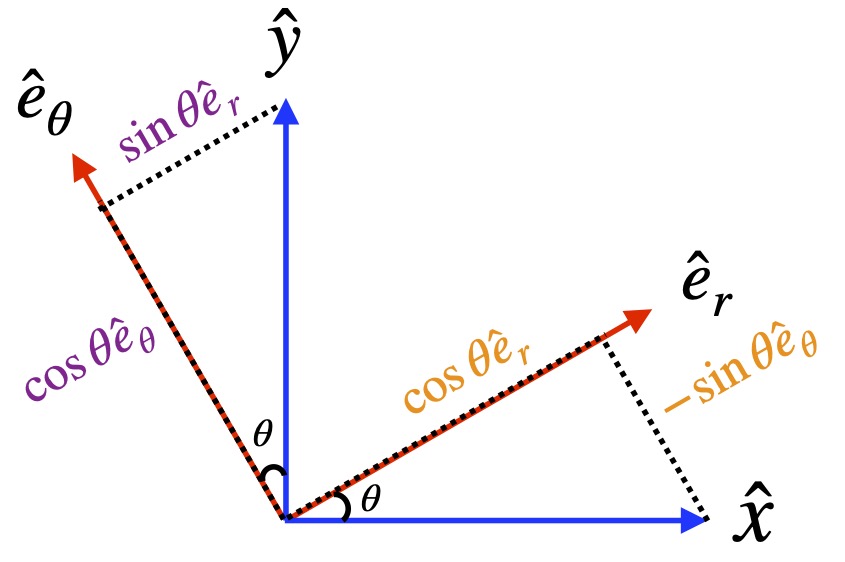
We can express Cartesian basis vectors in terms of polar basis vector, as follows:


Figure X may be helpful to understand these equations better.
Line Element
Anticipating derivation of the metric in polar coordinates, this section is designed to determine the line element in polar coordinates.
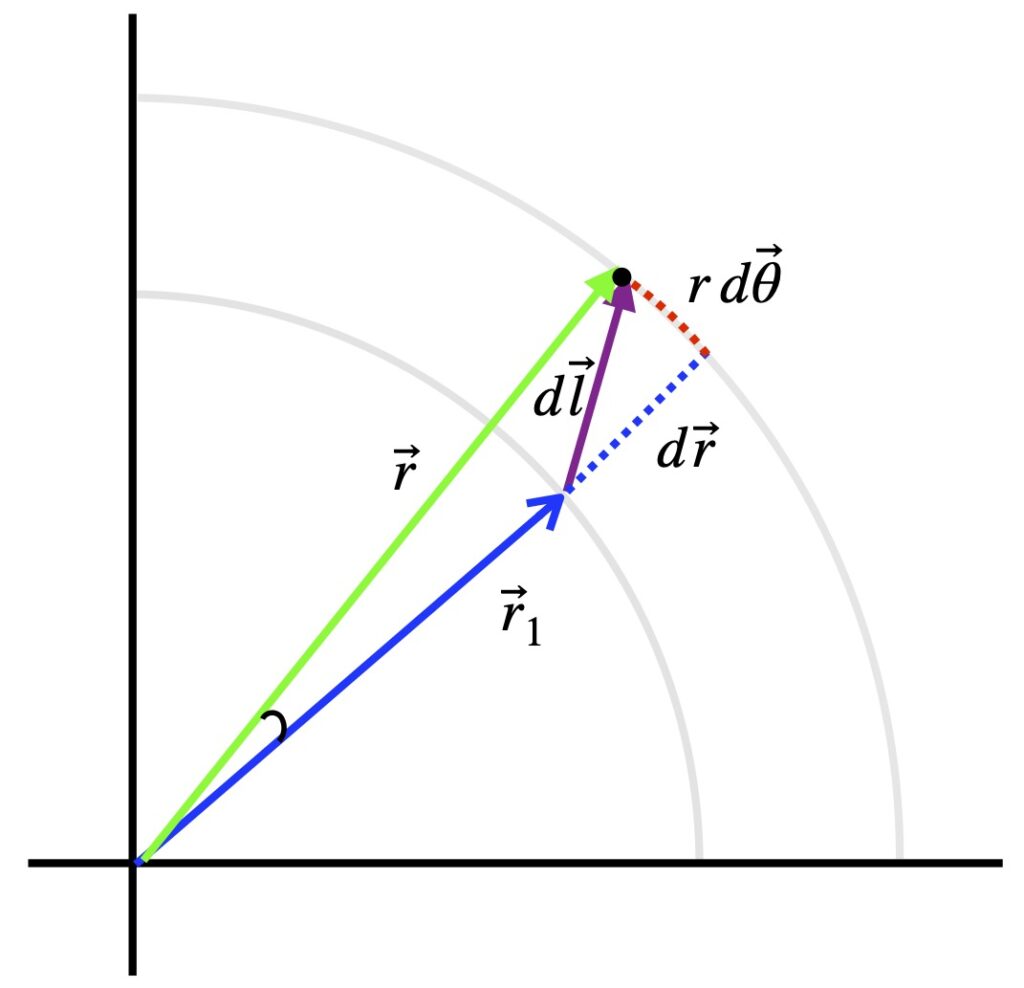
Referring to figure X (obviously not drawn to scale), we seek to find the infinitesimal displacement vector,  , as we move radially outward and counterclockwise from the tip of
, as we move radially outward and counterclockwise from the tip of  to the tip of . The radial component is just
to the tip of . The radial component is just  . The component in the direction of is the arc length between the outer tip of and the outer tip of which, in general, is the product of the radius times the angle in radians. Thus, we can write:
. The component in the direction of is the arc length between the outer tip of and the outer tip of which, in general, is the product of the radius times the angle in radians. Thus, we can write:

The line element, which is the length of the infinitesimal displacement vector – like the length of any vector – is given by the dot product of the infinitesimal displacement vector with itself. In polar coordinates, then, the line element is:

Cylindrical Coordinates
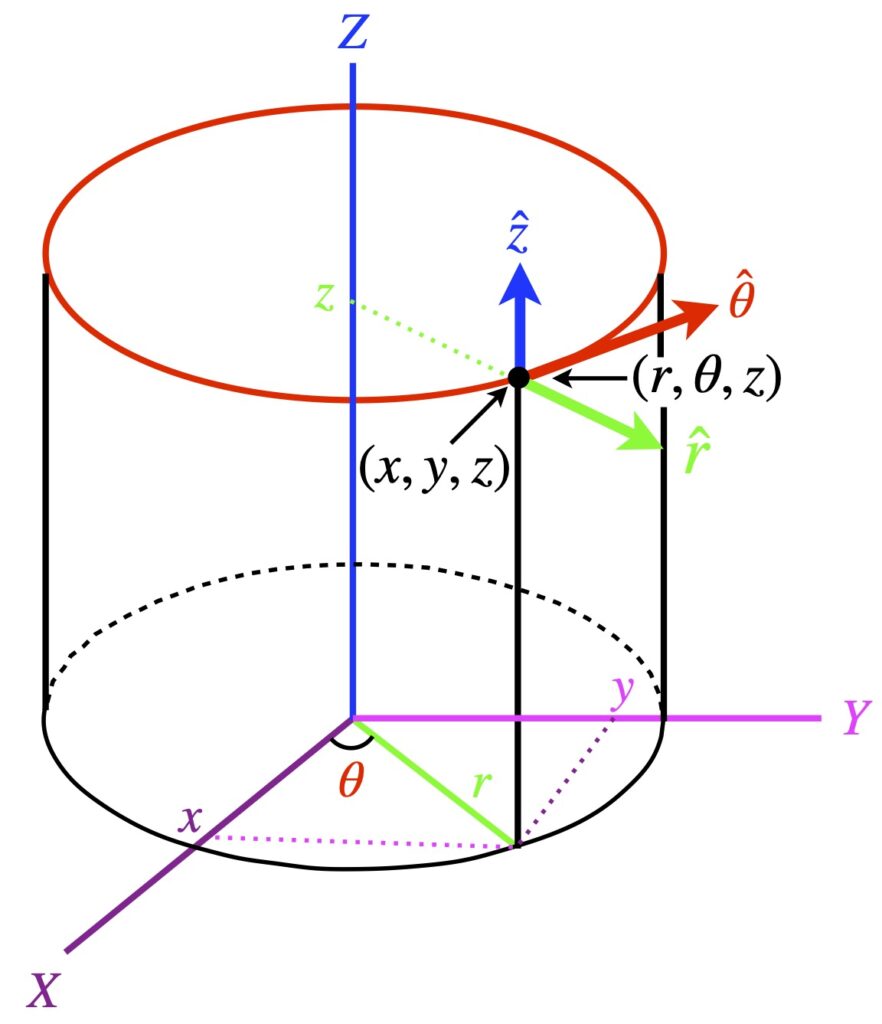
Cylindrical coordinates are similar to polar coordinates but with the addition of a z-coordinate that is equal to the Cartesian z-coordinate. Because I’ve gone through derivations for polar coordinates in the previous section, I won’t repeat them; instead, I’ll just catalogue the results.
Coordinates



Basis Vectors
Polar basis vectors in terms of Cartesian basis vectors:



Cartesian basis vectors in terms of Polar basis vectors:


Line Element

Spherical Coordinates
Coordinates
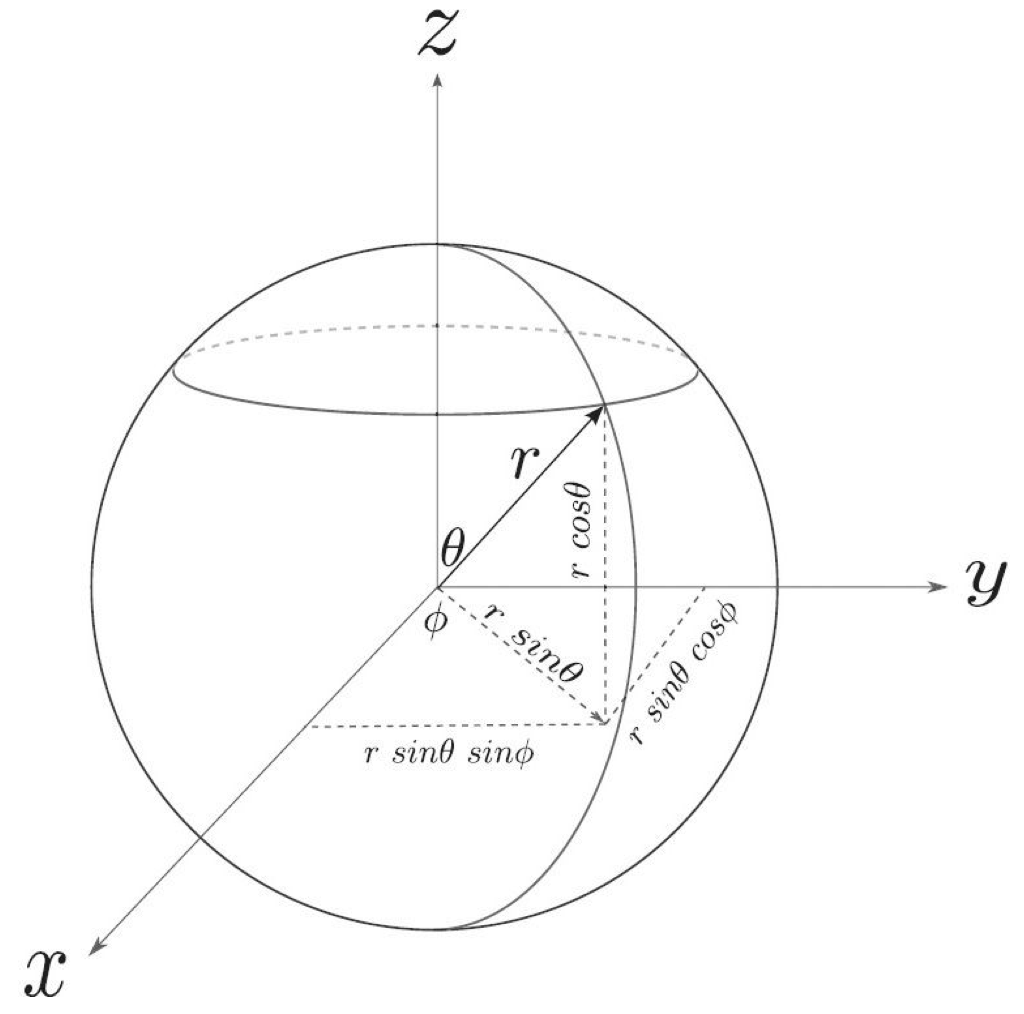
From figure X, we glean that:



Basis Vectors
We can describe the vector as follows:

Substituting the coordinate conversions from the last section, we have:


Back in our derivation of polar basis vectors, we discovered that

We make use of these relationships to find each of the spherical coordinate basis vectors:  ,
,  and
and  We’ll start with .
We’ll start with .

![=\displaystyle \frac{\partial \left[r(\sin\theta\cos\phi\,\hat{x} + \sin\theta\sin\phi\,\hat{y} + \cos\theta\,\hat{z})\right]}{\partial r}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-13a2edb3a93b18016ed99a708be5ffa7_l3.png "Rendered by QuickLaTeX.com")

To normalize , we have to divide by  :
:





So,


Deriving and are a bit more involved. Next we’ll look at .

![=\displaystyle \frac{\partial \left[r(\sin\theta\cos\phi\,\hat{x} + \sin\theta\sin\phi\,\hat{y} + \cos\theta\,\hat{z})\right]}{\partial \theta}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-48c27e55fb95d0c49089c0eb027af944_l3.png "Rendered by QuickLaTeX.com")

To normalize we need to divide it by its length. Thus,

![=\sqrt{r^2\left[\cos^2\theta(\cos^2\phi + \sin^2\phi) + \sin^2\theta\right]}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-b2f88dc6597c16011a78ada0b57f4f92_l3.png "Rendered by QuickLaTeX.com")
![=\sqrt{r^2\left[\cos^2\theta + \sin^2\theta\right]}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-755922d3683008c4f02762eb2fd10bbf_l3.png "Rendered by QuickLaTeX.com")


That means that:



Finally, we’ll derive . We begin with:

![=\displaystyle \frac{\partial \left[r(\sin\theta\cos\phi\,\hat{x} + \sin\theta\sin\phi\,\hat{y} + \cos\theta\,\hat{z})\right]}{\partial \phi}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-c8a56074086c4681719a7d805a9a7a7b_l3.png "Rendered by QuickLaTeX.com")


To normalize  , we need to divide it by its length. We get the length as follows:
, we need to divide it by its length. We get the length as follows:




And dividing by that length, we get:



To summarize, the basis vectors in spherical coordinates are:



The last thing I’d like to do in this section is prove that the spherical coordinate basis vectors are orthogonal. To do this, we show that the dot products of the basis vectors equals zero.






Line Element
We’ll first derive the line element in spherical coordinates by a method I’ll call the algebraic method.
In Cartesian coordinates, the line element is:

We know that:
The total derivative is defined as:

Using this on eq (), we have:



Then



Note that the squared terms in the equation above actually represent the dot product with itself (e.g.,  really means
really means  . I’ve used the squared shorthand to save space, in the equation above and in the equations that follow in this section.
. I’ve used the squared shorthand to save space, in the equation above and in the equations that follow in this section.
We showed, in the last section, that the spherical coordinate basis vectors are orthogonal. Therefore, terms multiplied by  ,
,  and
and  will all be zero. The only terms that survive are the
will all be zero. The only terms that survive are the  ,
,  and
and  terms.
terms.
For the  term:
term:

![=\left[\sin^2\theta(\cos^2\phi+\sin^2\phi)+\cos^2\theta\right]dr^2](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-d9879c901e834916de1e6db23ddd74a9_l3.png "Rendered by QuickLaTeX.com")


For the  term:
term:


![=\left[r^2(\cos^2\theta(\cos^2\phi+\sin^2\phi)) + \sin^2\theta\right]d\theta^2](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-83d7c13902b37bd79cea560a79ac2bf4_l3.png "Rendered by QuickLaTeX.com")
![=\left[r^2(\cos^2\theta + \sin^2\theta\right]d\theta^2](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-40aa95f6c96ce49b38fc079ca82f732e_l3.png "Rendered by QuickLaTeX.com")

For the  term:
term:



So the line element we’re left with is:

We can gain further intuition as to why the line element for spherical coordinates are what they are by examining figure X.
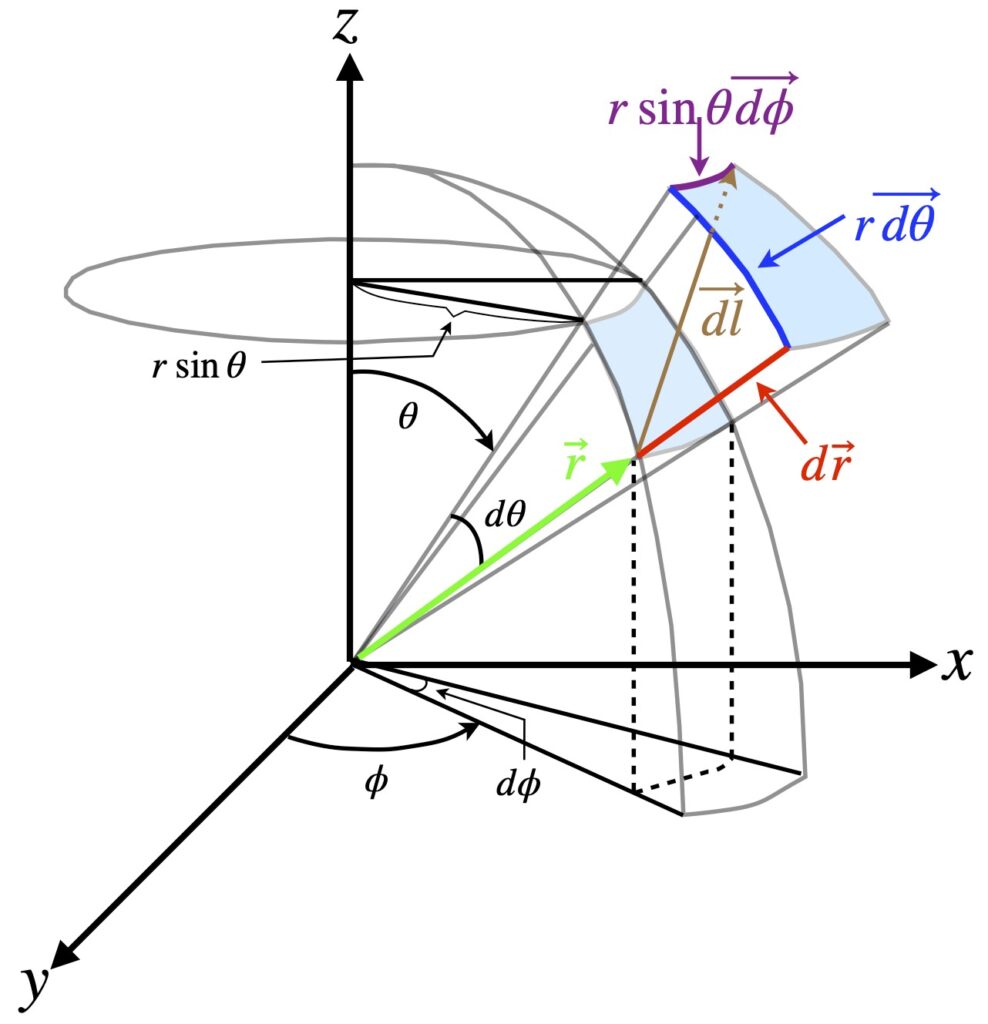
Figure X (obviously not drawn to scale) shows an infinitesimal spherical volume element. But that’s not what we’re actually interested in here. What we’re interested in is  (colored brown in the diagram). It represents an infinitesimal displacement made from:
(colored brown in the diagram). It represents an infinitesimal displacement made from:
- An infinitesimal displacement in the radial direction with magnitude 1 (shown in red)
- An infinitesimal displacement in the direction with magnitude (shown in blue)
- An infinitesimal displacement in the
 direction with magnitude
direction with magnitude  (shown in purple)
(shown in purple)
We obtain the magnitude of the -direction infinitesimal vector by recognizing that that vector is a tiny arc on a sphere. In general, the length of an arc is given by the radius of the sphere times the angle subtended by the arc in radians. In the case of the -direction vector, the radius is and the angle subtended by the arc is  .
.
Similarly, the magnitude of the -direction infinitesimal vector is given by the radius, (derived above), times the magnitude of the angle in the direction,  .
.
Thus, we can express the infinitesimal displacement vector, as:

The length of – which, by definition, is the line element  – is arrived at by taking the dot product of with itself:
– is arrived at by taking the dot product of with itself:



Vector Components in Rotated Cartesian Coordinates
Components in A and B coordinates:


From the diagram, we can see that:


Rearrange:

Write the above equation in matrix form:

Basis vector rotation in Cartesian coordinates


and


Using the appropriate trigonometric identities, we have:


In matrix form:
